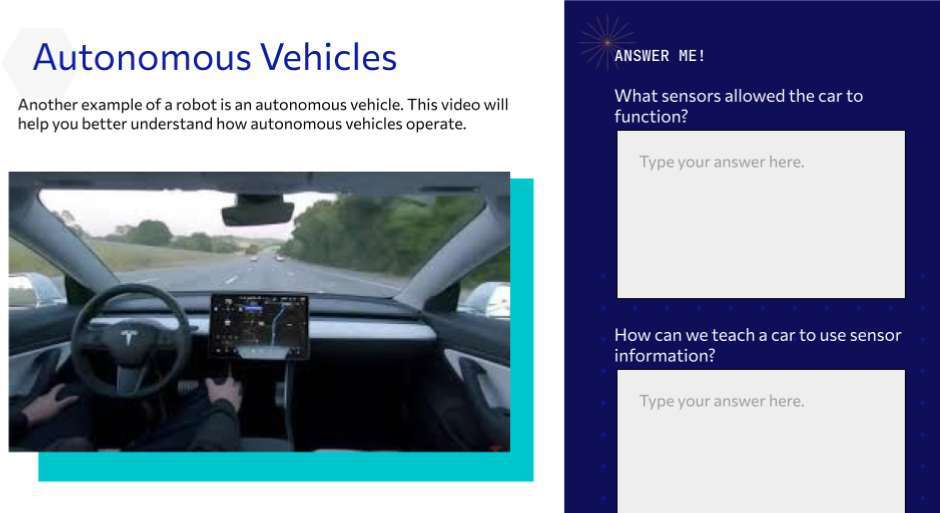
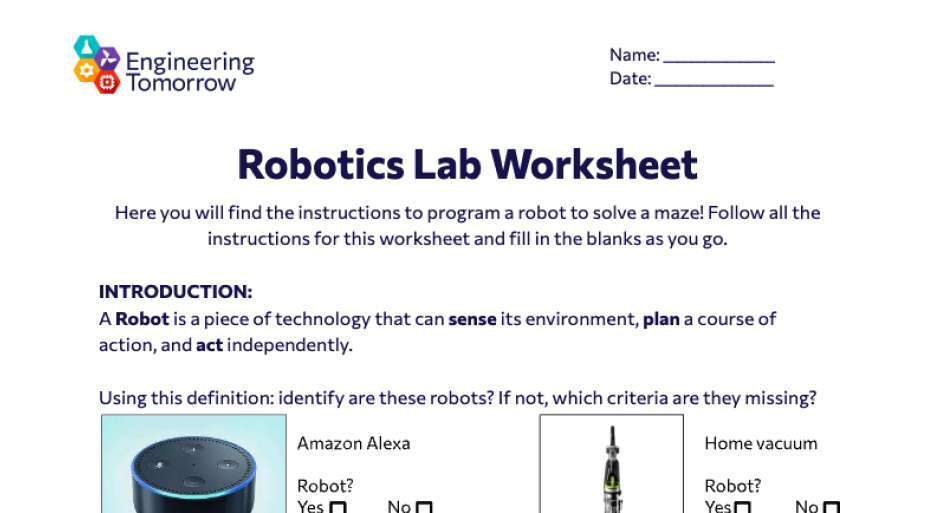
In this Robotics lesson, students will utilize block coding to move a virtual robot in a particular manner. Students will learn the basics of coding, including how to use variables, loops, and conditional statements. Throughout a variety of activities, students will put their coding knowledge to the test. The final activity will be navigating a virtual robot through a maze. Students will use the Coding Design Process to craft their code and iterate their designs.
Students will:
- Learn more about electrical engineering and computer science with a hands-on experience
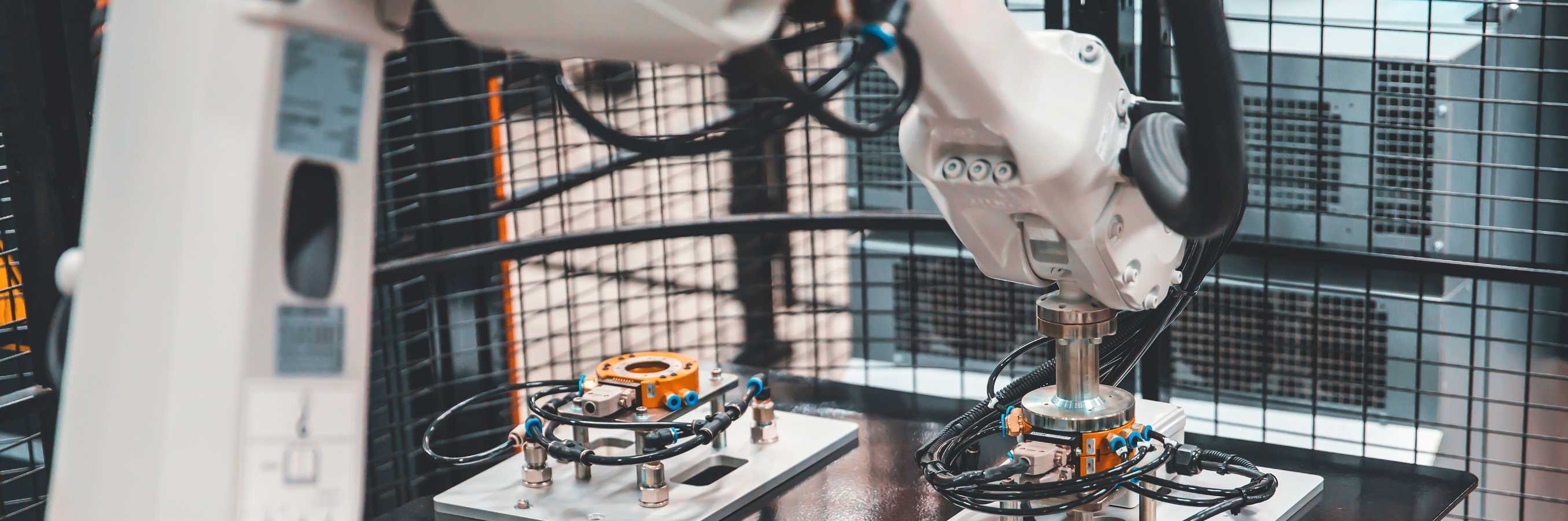
- Understand the basics of robotics systems
- Use the Coding Design Process to write code and improve it upon analysis
- Critically think in order to create their own set of solutions to their puzzles.
Carousel
Carousel



-

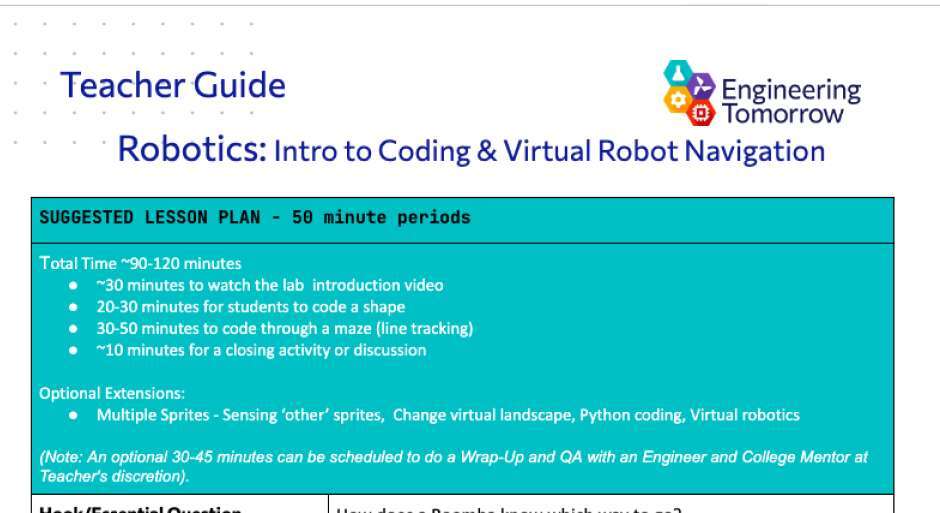
Lab time commitment
90-120 minutes
(including 30-minute intro video) -

Lab materials
Digital materials only
-

Live Q&A session and wrap up with
College Students & Professional Engineers
Classroom Tools & Resources
Get access to all of the presentation materials, workbooks and resources to run the Robotics lab in your classroom.

Lab Intro Videos
Get our engineer’s introduction to the lab topic and learn more about the lab activity.
Meet the lab intro host

Pat Marshall
Staff Engineer
Pat earned a Bachelor of Science in Civil Engineering from the University of Illinois at Urbana-Champaign, where he was a student-athlete in Track & Field/Cross Country and Rugby. He also served as Project Manager for the university’s Concrete Canoe Team for two years, leading engineering efforts and team coordination resulting in qualification to Nationals.
Following graduation, Pat joined the Peace Corps and was stationed in Lesotho, a mountainous region in southern Africa. There, he and his team were responsible for designing and constructing pedestrian bridges across rivers that were otherwise impassable for months at a time, providing critical access for local communities.
Upon returning to the U.S., Pat worked on a range of civil engineering projects—from hydraulic analysis for wastewater treatment facilities to designing highway on-ramp vertical curves. After several years in the industry, he discovered a passion for education and transitioned into teaching and coaching at the high school level.
Since 2003, Pat has taught physics, engineering, and computer science at St. Patrick High School and Benet Academy. Beyond the classroom, he has coached track and field, Science Olympiad, and robotics teams, combining his technical expertise with a deep commitment to student development.
Pat earned a Bachelor of Science in Civil Engineering from the University of Illinois at Urbana-Champaign, where he was a student-athlete in Track & Field/Cross Country and Rugby. He also served as Project Manager for the university’s Concrete Canoe Team for two years, leading engineering efforts and team coordination resulting in qualification to Nationals.
Following graduation, Pat joined the Peace Corps and was stationed in Lesotho, a mountainous region in southern Africa. There, he and his team were responsible for designing and constructing pedestrian bridges across rivers that were otherwise impassable for months at a time, providing critical access for local communities.
Upon returning to the U.S., Pat worked on a range of civil engineering projects—from hydraulic analysis for wastewater treatment facilities to designing highway on-ramp vertical curves. After several years in the industry, he discovered a passion for education and transitioned into teaching and coaching at the high school level.
Since 2003, Pat has taught physics, engineering, and computer science at St. Patrick High School and Benet Academy. Beyond the classroom, he has coached track and field, Science Olympiad, and robotics teams, combining his technical expertise with a deep commitment to student development.
Lab Day Keynote
Every Engineering Tomorrow Lab Day event ends with an inspiring keynote from an engineering expert. Watch this one from the latest Robotics Lab Day.

Josh Geating
Associate Director
Boston Dynamics